

|
|
HYDROFOIL DESIGN BASICS A BRIEF TUTORIAL
Traduction
de G. Delerm avec l'aimable autorisation de l'International Hydrofoil
Society
par John Meyer
Dernière mise à jour : 2 mars 1999
Le principe
de base des hydrofoils consiste simplement à soulever la coque d'un
bateau hors de l'eau et de la maintenir ainsi de façon dynamique
grâce à des surfaces portantes comparables à des ailes
(hydrofoils). Ceci permet de réduire l'effet des vagues sur le bateau
et de réduire la puissance nécessaire pour atteindre de grandes
vitesses. Les ingénieurs et les architectes navals s'intéressent
depuis de nombreuses années à ce concept. Aux USA, un brevet
concernant un système d'hydrofoils a été déposé
vers la fin des années 1880, à peu près en même
temps qu'étaient déposés les brevets sur les premiers
avions et les ailes. Le plus vieux record détenu par un engin à
hydrofoils date de 1894 lorsque les frères Meacham firent une démonstration
de leur bateau de 14 pieds à Chicago (Illinois). Ceci est à
mettre en parallèle avec le premier vol de l'avion des frères
Wright en 1903. Les premières tentatives dutilisation du concept
dhydrofoil ont été handicapées par le manque de matériaux
structuraux et de moteurs appropriés. Cependant, les progrès
dans ces secteurs dus en grande partie au développement de l'aviation
ont permis au cours des 30 ou 40 dernières années le développement
de la technologie nécessaire pour réaliser et utiliser des
bateaux à hydrofoils fiables et efficaces pour des applications
militaires et commerciales. Voir la référence [1]
L'histoire
des premiers développements et plus tard des programmes de la marine
américaine est relatée aux références [2] à
[5]
Ce guide est
composé de cinq paragraphes. Le premier est cette introduction.
Les trois suivants ont pour thèmes les différentes configurations,
les particularités et les caractéristiques. Enfin le dernier
paragraphe vous donnera une liste de références.
Pour utiliser
ce guide, sélectionner simplement un paragraphe dans la liste suivante.
|
|
|
|
|
- Les différentes configurations -
Dernière mise à jour : 9 mai 1998
Les différentes configurations que lon rencontre sur les engins à hydrofoils peuvent être classées en deux grands types :
Les foils «
traversants » (ou foils en V)
Les foils
totalement immergés.
Chaque type
dhydrofoil a une disposition et une façon de fonctionner particulières
(voir figure 1)
 |
figure
1 Configurations des hydrofoils:
foils
traversants à gauche et foils totalement immergés à
droite
1) Dans le système de foils traversants, une partie du foil traverse linterface air/eau lorsque lengin est sur ses foils. Des supports relient les foils à la carène du bateau. Ces supports sont assez longs pour maintenir la carène hors de leau à partir de la vitesse de décollage. A mesure que la vitesse augmente, la force de portance générée par le flux deau sur la partie immergée des foils augmente, ce qui entraîne une élévation du bateau et conséquemment une diminution de la surface immergée des foils. Pour une vitesse donnée le bateau sélève jusqu'à ce que la force de portance soit égale au poids soutenu par les foils.
2) Comme leur nom lindique, les foils du système « totalement immergé » sont conçus pour fonctionner en permanence sous leau. Les supports qui relient les foils à la coque et la supporte lorsque le bateau est décollé ne contribuent généralement pas à générer la force de portance. Dans cette configuration, le système dhydrofoils nest pas auto stable. Des moyens doivent être mis en uvre pour faire varier langle dattaque des foils et ainsi faire varier la force de portance en fonction de la vitesse, du poids ou des conditions de mer. Le principal (et lunique) avantage des systèmes à hydrofoils totalement immergés est leur capacité, dans une grande part, à isoler le bateau de leffet des vagues. Ceci permet à des bateaux à hydrofoils relativement petits de fonctionner sur les foils à grandes vitesses dans des conditions de mer couramment rencontrées avec un bon confort pour l'équipage et les passagers. Ce système permet également une meilleure utilisation de certains équipements militaires. Aux USA, le développement des bateaux à hydrofoils s'est concentré sur ce système d'hydrofoils totalement immergés à cause de cette qualité particulière.Les possibilités de dispositions des foils et des supports sont de trois types:
La disposition
canard
La disposition
classique
La disposition
tandem
Généralement,
les bateaux sont considérés classiques lorsque 65% ou plus
du poids est supporté par le foil avant. Ils sont considérés
canard lorsque 65% ou plus du poids est supporté par le foil arrière.
Lorsque le poids est réparti de façon relativement égale
entre l'avant et l'arrière la disposition est dite tandem.
|
|
|
|
 |
 |
0,00<X/L<0,35 |
 |
 |
0,65<X/L<1,00 |
 |
 |
0,35<X/L<0,65 |
figure 2 Dispositions des foils et des supports
dernière mise à jour : 2 mars 1999
Résistance à l'avancement et puissance de propulsion
Bien que la
raison principale de l'emploi des hydrofoils soit de soulever la coque
hors de l'eau pour réduire l'effet des vagues et pour réduire
la traînée à grande vitesse, un bateau à hydrofoils
passe une grande partie de sa vie avec sa carène dans l'eau et doit
avoir une forme de coque efficace pour maintenir une faible traînée
à
vitesse réduite et pendant le décollage. La traînée
totale juste avant le décollage est un facteur significatif pour
déterminer la puissance nécessaire. Une attention particulière
doit être prêtée à la conception de la coque
pour réduire au minimum cet effet.
La figure
3 montre une courbe générale de traînée
pour un bateau à hydrofoils avec sa " bosse " significative avant
le décollage. La comparaison est également faite avec un
bateau planant typique pour illustrer l'avantage à grande vitesse
des hydrofoils même sur eau plate. Pour surmonter la traînée
additionnelle au décollage qui résulte d'une mer formée,
une marge de puissance au-dessus de la traînée de décollage
sur eau plate est nécessaire.
Dans la mesure
ou l'importance de cette marge est un facteur principal dans la détermination
de la taille du système de propulsion, il est essentiel qu'elle
ne soit pas arbitrairement surévaluée. Les essais de
la marine américaine sur des hydrofoils, dans des conditions de
mer diverses, montrent que 20 à 25 pour cent de marge sont suffisants
pour permettre le décollage dans une mer forte dans n'importe quelle
direction.
 |
figure 3 Poussée typique sur eau plate
Comportement en mer
Les deux principaux avantages des bateaux à hydrofoils, par rapport aux monocoques ou aux autres types de carènes sont:
1) La possibilité, pour un bateau de relativement petite taille, de naviguer efficacement dans presque toutes les conditions de mer.Ce type de bateau à hydrofoils totalement immergés peut maintenir sa vitesse et
2) Une puissance nécessaire plus faible dans la gamme de vitesses de 30 à 50 nuds permettant ainsi un fonctionnement économique à ces vitesses élevées.
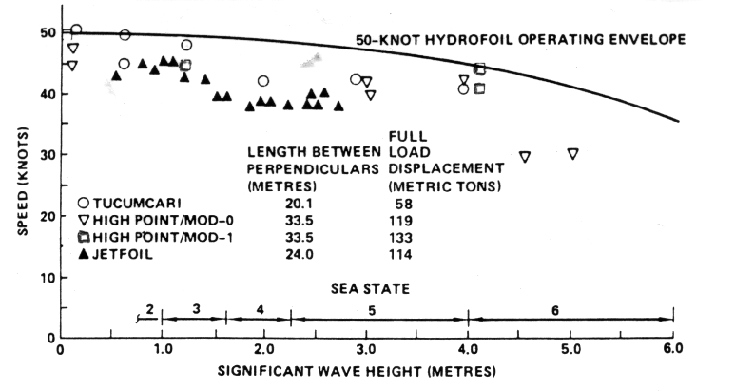 |
Figure
4 Effets des conditions de mer sur la vitesse des engins à
hydrofoils
et
courbe de traînée.
Manuvrabilité
Mis à
part l'avantage significatif au niveau de la vitesse, les engins à
hydrofoils sont plus manuvrants et plus stables que les bateaux conventionnels.
Les virages sur les foils s'effectuent avec une certaine inclinaison. Ceci
permet d'équilibrer les forces centrifuges dues au virage grâce
aux hydrofoils plutôt qu'à l'action (toujours aléatoire)
des supports. La coordination de l'inclinaison pendant les virages serrés
augmente le confort pour l'équipage car les accélérations
dues au virage sont ressenties principalement comme une légère
augmentation des forces verticales plutôt que des forces latérales.
Par exemple, un virage à 0,4g est ressenti comme une augmentation
de l'accélération verticale de 0,08g tandis que l'accélération
latérale est nulle. Par conséquent, les bateaux à
hydrofoils ont des taux de changement de cap de 6 à 12 degrés
par seconde, deux à quatre fois ceux des bateaux conventionnels,
et ils peuvent maintenir ces taux en eau plate comme en mer agitée.
Ceci permet
aux bateaux à vocations militaires d'être moins vulnérables
aux armes ennemis (missiles, canons, torpilles). La stabilité exceptionnelle
du bateau à hydrofoils en fait une excellente plate forme pour des
armes ou des équipement militaires utilisables dans les meilleures
conditions par l'équipage.
dernière mise à jour : 4 août 1999
Considération au sujet du poids
Comme le concepteur d'avion, le concepteur d'engins à hydrofoils doit, à tout moment, être extrêmement attentif au problème de poids. Le poids est un élément critique pour les bateaux à hydrofoils. Chaque kilo économisé pour la structure, l'équipement ou les machines sera disponible pour la charge utile et le carburant.
Le concepteur
de la structure, afin d'économiser sur le poids, va utiliser des
techniques aéronautiques. Par rapport aux bateaux conventionnels,
les engins à hydrofoils sont soumis à des contraintes très
élevées provoquées en particulier par des vitesses
de fonctionnement élevées. De fait, on emploie des
matériaux légers et de haute résistance. On doit également
faire face à des problèmes de fatigue, d'hydroélasticité,
de fluage et d'usure.
Considérations au sujet de la coque
La mise au
point d'une coque satisfaisante pour un engin à hydrofoils représente
un défi significatif pour le concepteur. La coque devra être
efficace lors de la navigation sur la carène mais également
lors du décollage et pendant la navigation sur les foils lorsque
la coque reçoit les impacts des vagues. En outre, la coque
d'un bateau à hydrofoils doit satisfaire à toutes les conditions
de solidité et de stabilité (quelle soit intacte ou endommagée)
comme celle de n'importe quel autre bateau.
Par conséquent,
les coques de bateaux à hydrofoils sont généralement
construites en utilisant des alliages d'aluminium à hautes teneurs,
l'utilisation des alliages soudables des séries 5000 étant
typique. Structurellement, la coque doit résister à l'impact
des vagues à grande vitesse et répartir les contraintes qui
se concentrent au niveau des fixations des supports.
Bien que les
coques des bateaux à hydrofoils semblent très conventionnelles,
les compromis exigés sont beaucoup plus complexes que ceux demandés
sur un bateau monocoque à cause des différents modes de navigation.
Pour être
efficace à faible vitesse, une coque doit être étroite.
Cependant, sur un bateau à hydrofoils, le maître bau doit
être assez important pour satisfaire aux critères de stabilité
lorsque les foils sont repliés.
Pour traverser
la crête des vagues, la coque doit présenter un V profond
à l'avant ainsi qu'un dièdre important.
Une autre
considération majeure à prendre en compte est le comportement
par mer forte. Si les bateaux à hydrofoils sont conçus pour
naviguer dans toutes les conditions de mer, ils doivent être capables
de résister à une tempête en mode non décollé.
En outre,
dans certaines missions, on doit s'attendre à ce qu'un bateau à
hydrofoil soit la plupart du temps en mode non décollé. Il
est donc essentiel de porter une grande attention aux caractéristiques
de la coque afin qu'elle ait une bonne tenue en mer.
Lorsque les
foils sont déployés, en mode non décollé, on
constate une réduction significative du tangage et du roulis (comportements
difficiles à amortir sur un bateau classique). L'ensemble supports/foils
donne au bateau en mode non décollé les caractéristiques
d'un bateau plus grand.
Mécanismes des foils
On obtient
des variations de la portance d'un hydrofoil soit avec des volets sur le
bord de fuite soit en modifiant l'incidence de tout le foil comme le montre
la figure 5.

figure 5 Contrôle de la force hydrodynamique
Limites de poids.
La loi, si
bien nommée, "carré-cube" impose une limitation fondamentale
au développement des bateaux à hydrofoils.
La portance
générée par les foils est proportionnelle à
leur surface (le carré d'une longueur), alors que le poids à
soulever est proportionnel à un volume (le cube d'une longueur).
Il s'ensuit qu'alors que la taille d'un bateau à hydrofoil augmente,
les foils tendent à déborder exagérément de
part et d'autre de la coque.
L'aviation
a résolu ce problème en augmentant la vitesse et donc la
charge de l'aile mais en pratique la vitesse des hydrofoils est limitée
par le phénomène de cavitation.
Au début
du développement des hydrofoils, on a pensé que l'application
directe de la loi "carré-cube" limiterait la taille des bateaux
à hydrofoils par augmentation des contraintes sur les foils et les
supports. Des études plus poussées ont montré que
les contraintes sur les foils n'augmentent que peu avec la taille du bateau.
(voir figure
6)

figure 6 Contraintes de poids sur les supports et les foils
En fait, la
longueur des supports augmente en fonction de l'état de la mer que
l'on souhaite affronter et non pas en fonction de la taille du bateau.
C'est la principale raison pour laquelle les contraintes de poids n'augmentent
pas autant qu'on aurait pu le prévoir.
Pour un meilleur
rendement hydrodynamique, il est recommandé de définir des
foils ayant un allongement (envergure/corde) aussi grand que possible.
Le foil arrière du bateau à hydrofoils "PHM" dépasse
de presque 10 pieds (3 m) de chaque côté de la coque. On est
alors obligé d'utiliser un "chameau" ( ndt: ponton spécial)
pour maintenir le bateau à bonne distance du quai pour l'amarrer.
Lorsqu'on ne peut pas utiliser de "chameau" le bateau doit être amarré
en travers à l'extrémité d'un quai ou contre la poupe
d'un bateau plus large.
Lorsque la
taille du bateau augmente ainsi que celle des foils, des considérations
pratiques concernant les contraintes limitent l'envergure des foils. La
tendance actuelle est d'utiliser une configuration de foils en tandem pour
équilibrer les contraintes sur les foils avant et arrière.
Systèmes de propulsion.
Les bateaux
à hydrofoils modernes se sont développés grâce
à la mise au point de moteur diesel légers et de turbines
à gaz spécialement conçues pour la mer. La plupart
des bateaux commerciaux européens utilisant des systèmes
de foils traversants fixes mettaient en uvre des moteurs diesel légers
entraînant des hélices subcavitationnelles par l'intermédiaire
d'un arbre incliné. Cette configuration permet une construction
simplifiée, un entretien et un coût réduits. Cependant,
le poids spécifique relativement élevé (6 à
8 livres par cheval - 2,7 à 3,6 kg par cheval) de ces moteurs diesel
et une traînée totale plus importante ne permettent à
ces bateaux que des vitesses de l'ordre de 30 à 40 nuds.
Les turbines
à gaz présentes sur les avions, légèrement
modifiées et accouplées à des pompes spéciales
sont mieux adaptées pour la gamme de puissance allant jusqu'à
30 000 chevaux et leur poids spécifique est de l'ordre de 0,5 livre
(227 g) par cheval. Les machines les plus récentes, utilisant des
systèmes de refroidissement des pales, ont des plages de consommation
de carburant comparables aux moteurs diesel pour des puissances comparables.
Les turbines
ont été utilisées dans la conception de la plupart
des bateaux américains militaires ou commerciaux, ce qui leur permet
de dépasser les 40 nuds. Les hélices constituent la façon
la plus efficace de fonctionner pour la gamme des vitesses subcavitationnelles
des bateaux à hydrofoils courants. Les systèmes de transmission
de la puissance lorsqu'on utilise des foils totalement immergés,
sont constitués de pignons d'angle, d'arbres flexibles et éventuellement
de train d'engrenage pour réduire le régime dans le puits
de transmission. (voir exemple figure 7)

figure 7 Système de propulsion PGH-1 FLAGSTAFF
Les problèmes posés par les systèmes de transmissions par engrenages sur les premiers bateaux à hydrofoils ont entraîné un intérêt particulier pour les systèmes de propulsion à jet d'eau. Bien qu'ils néliminent pas complètement l'utilisation de boîte de vitesse, ces systèmes sont constitués d'entrées d'eau, de canalisations logées dans les supports, d'une pompe logée dans le compartiment des machines et d'une tuyère d'expulsion de l'eau au dessus du niveau de l'eau. Le système à jet d'eau du "PHM" de la marine américaine est détaillé à la figure 8. Le prix à payer pour profiter de la simplicité de ce système est une diminution du rendement de l'ordre de 20 % à 45-50 nuds et une diminution du rendement considérablement plus importante lors du décollage à cause de l'augmentation de poids du système de propulsion due à la quantité d'eau embarquée par le système.

figure 8 système à jet d'eau du "PHM"
Système automatique de régulation.
Comme vu plus haut, les configurations à hydrofoils traversants sont auto stables en tangage et en roulis et donc ne requièrent pas de système automatique de régulation. Cependant, pour réduire les réactions dues aux mers fortes, un certain nombre de bateaux sont équipés de volets au niveau du bord de fuite de leurs foils traversants et utilisent des systèmes de pilotage automatique.
Aux États
Unis, un système automatique de régulation appliqué
à des foils totalement immergés a été considéré
comme le meilleur moyen d'atteindre de grandes performances. Généralement,
la régulation est obtenue en positionnant des volets de bord de
fuite sur les foils avant et arrière et en faisant pivoter le support
mobile avant (gouvernail), ou en faisant pivoter l'ensemble du foil et
en utilisant le support arrière moteur comme un gouvernail. Voir
figures 9 et 10 les diagrammes de principe du système de régulation.
Les éléments
effecteurs sont commandés par de classiques servo-moteurs éléctro-hydrauliques.
Les capteurs sont les suivants:
- un gyroscope vertical qui mesure les angles de tangage et de roulis.
- un gyroscope proportionnel pour mesurer les mouvement de lacet du bateau.
- trois accéléromètres verticaux, un dans la partie supérieure de chaque support. (les deux arrières travaillant de façon différentielle pour mesurer l'accélération due au roulis et de façon concomitante pour mesurer l'accélération due au tangage et à la houle).
- un capteur de hauteur qui mesure l'altitude de l'étrave au dessus de l'eau.
Les commandes manuelles se résument en un contrôle de la profondeur des foils que le barreur utilise pour faire varier "l'altitude de vol" et en une barre à roue qui permet de changer de cap.

Figure
9 Schéma du fonctionnement de l'ACS

Figure 10
Le système
ACS permet un contrôle continu pendant le décollage et l'amerrissage
et toutes les phases du fonctionnement sur les foils. Les boucles de régulations
concernant le tangage, le roulis et l'altitude permettent une stabilisation
automatique du bateau. Pour piloter le bateau, le barreur commande uniquement
la barre et le système ACS contrôle les coordonnées
du virage. (voir les références [7], [8] et [9])
Système hydraulique.
Les systèmes de contrôle hydrauliques sont particulièrement intéressant car :
1) ils
ont prouvé leur fiabilité et sont fonctionnellement bien
adaptés à un bateau à hydrofoils.
2) ils
utilisent des concepts éprouvées sur les équipements
des avions.
3) ils
sont utilisés pour toutes les manuvres : fonctionnement sur les
foils, sur la carène et amarrage.
Dans la mesure
où les circuits hydrauliques ont une importance cruciale lors du
fonctionnement sur les foils et sur la carène, on devra prévoir
lors de la conception, de multiples niveaux de redondance pour assurer
un fonctionnement continu en cas de pannes du système.
Sur le PHM, par exemple, quatre systèmes séparés fournissent la puissance requise aux divers effecteurs hydrauliques et en particulier les effecteurs de décollage et d'amerrissage, ceux permettant la rétraction des supports et leur verrouillage, le guindeau d'ancre, et la pompe d'essence de secours. Les systèmes d'alimentation hydrauliques numéro 1 et 2 alimentent l'avant du bateau alors que les systèmes 3 et 4 alimentent l'arrière. Deux circuits d'alimentation séparés sont utilisés pour chaque effecteur avec un système de transfert pour passer d'un circuit à l'autre en cas de perte de pression d'un des circuit. Les circuits hydrauliques du PHM fonctionnent à une pression constante de 3.000 livres par pouce carré (20,68 MN/m2). Du matériel éprouvé dans l'aéronautique, la plupart du temps provenant du Boeing 747, a été utilisé autant que possible. Toutes les pompes hydrauliques, les joints, la tuyauterie, et les filtres sont issus directement du 747. Dans le cas des vérins d'orientation des foils, un clapet de transfert automatique a été spécifiquement développé pour le programme afin de permuter rapidement l'alimentation de ces vérins et ainsi rendre le fonctionnement sur les foils plus sûr. Les vérins hydrauliques du PHM sont, pour la plupart, spécifiquement conçus et développés pour ce programme. Les quatre commandes de foils, les inverseurs de poussée et les rétracteurs de supports ont été conçus, fabriqués et testés selon des normes militaires particulièrement rigoureuses.
Le programme de développement du PHM a permis la mise au point et l'utilisation d'un nouveau fluide hydraulique, un hydrocarbure de synthèse. Ce nouveau fluide garantit une beaucoup plus grande résistance à l'incendie et à l'explosion que son prédécesseur. Il remplace avantageusement les fluides à base de phosphate ester qui se sont avérés incompatibles avec l'environnement marin.
dernière mise à jour: 31 août 2000
[1] "Modern Ships and Craft", Special Edition of Naval Engineers Journal, pp. 142-199, February 1985.
[2] Oakley, Owen H., "Hydrofoils--A 'State-of-the-Art' Summary," Proceedings of the Hydrofoil and Air Cushion Vehicles Institute of Aerospace Sciences, Washington, D.C., September 1962.
[3] Ellsworth, William M., "The U.S. Navy Hydrofoil Development Program-A Status Report," AIAA/SNAME Advanced Marine Vehicles Meeting, AIAA Paper Number 67-351, May 1967.
[4] Lacey, Ralph E., "A Progress Report on Hydrofoil Ships,"Quarterly Transactions of the Royal Institute of Naval Architects, Volume 1, Number 1, January 1965.
[5] Johnston, Captain Robert J. USNR (Ret), "History of U.S. Involvement in Developing the Hydrofoil," First International Hydrofoil Society Conference, Ingonish Beach, Nova Scotia, Canada, July 1982.
[6 Sarchin, T.H. and L.L. Goldberg, "Stability and Buoyancy Criteria for U.S. Naval Surface Ships," Transactions SNAME 1962.
[7] Vogt, James E., "Automatic Control of the Hydrofoil Gunboat, TUCUMCARI," AIAA 2nd Advanced Marine Vehicles and Propulsion Meeting, AIAA Paper Number 69-729, 1969.
[8] Stark, D.R., "The PHM Automatic Control System," SAE National Aerospace Engineering and Manufacturing Meeting, San Diego, California, October 1974.
[9] Johnston,
Robert J. and W.C. O'Neill, "The Development of Automatic Control Systems
for Hydrofoil Craft,"International Hovercraft, Hydrofoil and Advanced Transit
System Conference, Brighton, England, May 1974.
|
|
|